Essential Learning
Start here before handling any electronics. These videos teach the fundamental skills you'll use throughout your build.



Common Component Configurations
Proven electronics combinations that work well together. Choose based on your budget and complexity preference.
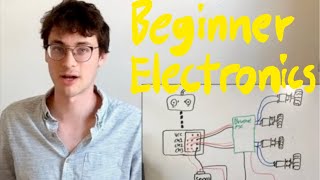
Example System (Detailed Guide)
- Drive: 2x Repeat Mini Mark II + Repeat Budget Dual ESC
- Weapon: RS 2205 Motor + ReadyToSky 35A ESC
- Control: FlySky FS2A Receiver
- Power: FingerTech Screw Switch + 3S LiPo
Alternative Options
- Drive Motors: Turnabot/Malenki N20 motors
- Drive ESCs: FingerTech tinyESC or compatible
- Complete Kits: SCAR electronics from Team Malice
- Sources: Palm Beach Bots, Bristol Bot Builders
Soldering Fundamentals
Master these basics to create reliable connections that won't fail during combat.
Iron Setup & Temperature
- 360°C for lead-free solder
- 340°C for leaded solder
- Keep tip shiny - clean with brass sponge after each step
- Tin the tip before each joint
Essential Techniques
- Pre-tin all components (wires, pads, terminals)
- Heat the joint, not the solder
- Use flux when solder won't stick
- Let joints cool without moving
Step-by-Step Wiring Process
Follow this sequence for reliable results. Each phase builds on the previous steps.
Preparation
Soldering iron setup checklist, pre-tin all connection points, solder receiver pins properly
Drive System
Enable mixing on dual ESC (critical step), wire drive motors with correct polarity, test drive directions
Weapon System
Connect brushless motor to weapon ESC, ESC arming sequence, direction testing (swap wires if needed)
Power & Safety
Create main power harness, wire power switch correctly, final connection verification
Testing & Verification
Critical safety steps that prevent damage and ensure competition readiness.
Critical Safety Steps
- Smoke stopper testing - Mandatory first step to prevent shorts
- Binding receiver to transmitter - Establish radio control
- Functional testing checklist - Verify all systems work
- Competition readiness verification - Final safety checks
Common Issues & Solutions
Quick fixes for the most frequent wiring problems builders encounter.
| Problem | Most Likely Cause | Solution |
|---|---|---|
| One motor not spinning | Loose solder joint | Check motor solder joints, test another channel |
| Robot only turns OR drives | ESC mixing not configured | Enable mixing on drive ESC (critical step) |
| Receiver not powering | BEC connection issue | Verify ESC BEC output, check plug polarity |
| ESC won't arm | Binding/signal problem | Rebind receiver, check signal cables |